УДК 629.7.058.82-752.4.58.084.2
В.М. Ачильдиев, канд. техн. наук, В.Н. Дрофа, В.М. Рублев, канд. техн. наук,
НПП “Регуста”, г. Москва.
МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ
ГИРОСКОП-АКСЕЛЕРОМЕТР
![]()
|
Рассматривается конструкция микромеханического вибрационного
гироскопа-акселерометра, конструктивно выполненного в виде маятника с
емкостным датчиком угла и электростатическим датчиком момента. Показывается, что выходной сигнал прибора будет содержать составляющие, пропорциональные входной угловой скорости и линейному ускорению |
![]()
Микромеханические гироскопы и акселерометры, изготавливаемые групповым методом на основе интегральной технологии, в силу малых энергомассовых характеристик (масса – доли грамма, энергопотребление – доли ватта) и низкой стоимости представляют большой интерес для различных областей техники [1-5].
В настоящее время (прежде всего – за рубежом) разработкой этих приборов занимается большое число фирм, при этом финансирование разработок идет как со стороны государственных организаций, так и частных предприятий.
В России созданием таких приборов занимается ряд гироскопических фирм в интересах различных ведомств. При этом каждое предприятие разрабатывает свою схему прибора с учетом возможностей производства того или иного предприятия.
|
|
|
Рис. 1. Общий вид чувствительного элемента |

Микромеханический гироскоп-акселерометр, разрабатываемый фирмой НПП “Регуста” (рис. 1), содержит плату 1 из кристалла на основе диэлектрика 3 (стекло, ситалл, сапфир, кремний), на которой размещены элементы электроники и сборки узла чувствительного элемента 2.
Инерционный узел чувствительного элемента консольного типа состоит из пластины 5 в форме квадрата (на основе кремния или металла), на поверхности которого равномерно распределены сквозные отверстия 6, выполненные в форме многоугольника с числом граней не менее четырех, и элементов подвеса. Размер стороны каждого отверстия (квадрата или наибольшей из диагоналей многоугольника) в плане таков, что он не менее чем в 2 раза превышает начальный зазор между пластиной 5 и электродами платы 1. Максимальный размер этой стороны определяется конструктивными соображениями и характеристиками системы измеряемой емкости. Боковые стороны пластины 5 выполнены в виде гребенчатых зубцов 7.
Элементы подвеса инерционной массы представляют собой две параллельные упругие балочки 8, жестко закрепленные с одной стороны на опорах 9, основания которых жестко закреплены на плате 1. С другой стороны, балочки 8 соединены с пластиной. Соединение выполнено на линии геометрического центра пластины инерционной массы, а сами балочки располагаются в параллельных прорезях пластины. Выполнение балочек с поперечным сечением в форме квадрата является оптимальным с точки зрения технологичности изготовления и настройки измерительных характеристик устройства. Неподвижные электроды 10 электростатической системы возбуждения расположены на опорах 11 и 12, которые закреплены на плате 1.
На плате 1 сформированы электроды 4 датчика угла и момента и пять контактных площадок 13-17, соединенных с помощью пяти токопроводящих дорожек 18-22 с электродом датчика угла и датчика момента, электродами электростатической системы возбуждения 11 и 12 и электродами инерционной массы 5. Размеры кристалла одного из вариантов исполнения платы составляют 1,8´1,8´1,15 мм, пластины инерционной массы – 0,308´0,308 мм при зазоре между пластиной и платой от 2 до 5 мкм,
|
|
|
Рис. 2. Структурная схема микромеханического |
Питание прибора осуществляется (рис. 2) от генератора системы электростатического возбуждения 23, который через регуляторы напряжения 24, 25 запитывает электроды 11 и 12 системы возбуждения и один из двух фазочувствительных выпрямителей 33. Электронная схема обработки сигнала включает в себя также генератор питания для датчика угла 26, регулятор напряжения 27 датчика угла и датчика момента, сигнал с которого подается на электроды датчика угла и датчика момента, фильтр канала акселерометра 28, предварительный усилитель 29, первый фазочувствительный выпрямитель 30, корректирующий контур 31, разделительный фильтр 32, второй фазочувствительный выпрямитель 33 и фильтр канала гироскопа 34.
Микромеханический вибрационный гироскоп-акселерометр работает следующим образом.
При включенном питании под воздействием электростатических сил в зазорах гребенчатых зубцов на частоте источника питания пластина 5 совершает боковые возвратно-поступательные движения. Когда относительно направления, параллельного направлениям балочек 8 упругого подвеса, действует угловая скорость, на той же частоте в направлении, ортогональном плоскости пластины 5, возникают кориолисовы силы, которые приводят в колебательное движение эту пластину. В результате изменяются зазор и емкость между электродами датчика угла. На его выходе возникает переменный сигнал (напряжение), амплитуда которого пропорциональна измеряемой угловой скорости.
При действии линейного ускорения в направлении, ортогональном плоскости пластины 5, межэлектродная емкость и сигнал датчика угла будут изменяться по закону действующего ускорения.
При вынужденных колебаниях маятника ![]() под действием
электростатических сил уравнение движения чувствительного элемента (ЧЭ) по оси
съема информации с точностью до членов первого порядка малости без учета
погрешностей конструктивного исполнения можно представить в следующем виде:
под действием
электростатических сил уравнение движения чувствительного элемента (ЧЭ) по оси
съема информации с точностью до членов первого порядка малости без учета
погрешностей конструктивного исполнения можно представить в следующем виде:
![]() ,
,
где ![]() – угол отклонения пластины
ЧЭ;
– угол отклонения пластины
ЧЭ; ![]() – осевой момент
инерции пластины;
– осевой момент
инерции пластины; ![]() – относительный коэффициент
демпфирования;
– относительный коэффициент
демпфирования; ![]() – масштабный коэффициент;
– масштабный коэффициент; ![]() ,
, ![]() – масса
пластины и плечо маятника;
– масса
пластины и плечо маятника; ![]() – частота собственных
колебаний;
– частота собственных
колебаний; ![]() – входная угловая
скорость основания;
– входная угловая
скорость основания; ![]() – линейное ускорение
по оси
– линейное ускорение
по оси ![]() .
.
Для установившегося движения:
 .
.
Из представленного выражения видно, что выходной сигнал прибора будет
содержать периодическую составляющую, амплитуда которой пропорциональна входной
угловой скорости ![]() основания, и постоянную
составляющую, пропорциональную его линейному ускорению. Это позволяет
обеспечивать одновременно измерение угловой скорости и линейного ускорения с
помощью одного прибора. Разделение сигналов по каналам гироскопа и
акселерометра проводится по частотному признаку с использованием фильтрации
(фильтры 28, 34
на рис. 2).
основания, и постоянную
составляющую, пропорциональную его линейному ускорению. Это позволяет
обеспечивать одновременно измерение угловой скорости и линейного ускорения с
помощью одного прибора. Разделение сигналов по каналам гироскопа и
акселерометра проводится по частотному признаку с использованием фильтрации
(фильтры 28, 34
на рис. 2).
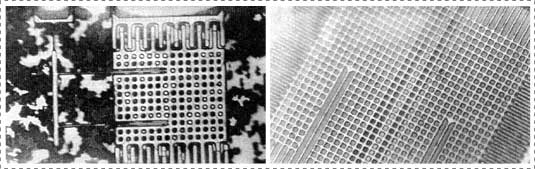
Фотографии фрагментов чувствительного элемента (инерциального узла) гироскопа-акселерометра на основе структуры стекло-кремний (верхняя фоюграфия) и металл-сапфир (нижняя фотография) приведены на рис. 3. Фотографии сделаны с увеличением порядка 150 крат.
|
|
|
Рис. 3. Фотографии фрагментов ЧЭ ГАМ-10КЕОБ на основе многослойной структуры кремний-стекло и на основе многослойной пленочной структуры металл-сапфир |
В таблице приведены некоторые характеристики четырех ЧЭ консольного типа, изготавливаемых НПП “Регуста” с использованием различных материалов и технологий.
Таблица 1.
|
Характеристика |
Год
разработки |
|||
|
1997 |
1998 |
1999 |
2000 |
|
|
Тип прибора |
||||
|
ГАМ-10КЕОБ |
ГАМ-10ПЕОБ |
|||
|
Габаритные
размеры ЧЭ, мм |
1,8´0,6´0,01 |
0,3´0,3´0,002 |
0,3´0,3´0,002 |
0,29´0,29´0,0015 |
|
Габаритные
размеры кристалла, мм |
2,0´2,0´0,35 |
1,8´1,8 |
1,8´1,8´0,35 |
2,0´2,0´0,35 |
|
Технология
изготовления |
Сварка
кремний + стекло |
|
Пленочная |
|
|
Материал
ЧЭ |
Кремний |
|
Металл |
|
|
Материал
платы |
Стекло |
Полиамид
+ ситалл |
Полиамид
+ сапфир |
Сапфир |
|
Потребность
в вакуумировании |
+ |
- |
- |
- |
|
Число
фотолитографий |
5 |
4 |
3 |
2 |
|
Трудозатраты
на один кристалл, чел/ч |
29,7 |
3,5 |
2,7 |
1,1 |
|
Процент
выхода годных, % |
<0,1 |
0,1-0,3 |
1-3 |
10 |
Из таблицы 1 следует, что наиболее прогрессивной технологией с точки зрения трудозатрат, а, следовательно, и стоимости является пленочная технология. Изготовление ЧЭ может быть проведено с использованием двух фотолитографий при выходе годных приборов до 10%.
Список литературы
1. Bokenhorn В. Planar Inertial Sensor. US Patent, 4.598 (08.07.86).
2. Elvel J. Progress on Micromechamcal Inertial Instruments // AIAA. 1991. V. 2705, P. 1482-1485.
3. Ачильдисв В.М., Дрофа В.Н. Комбинированный микромеханический вибрационный гироскоп-акселерометр для инерциальных измерительных систем // Космонавтика и ракетостроение. 1995. № 5. С. 79-83.
4. Лестев А.М., Попова И.В. Микромеханические гироскопы. Современное состояние теории и практических результатов разработки микромеханических гироскопов // Гироскопия и навигация. 1998. № 1.
5. Мезенцев А.П., Доронин В.П., Новиков Л.3., Харламов С.В. Основные проблемы создания инерциальных измерительных блоков на базе микромеханических гироскопов и акселерометров // Гироскопия и навигация. 1997. № 1. С. 7-14.
6. Почалов А.И., Тимошенков В.П., Тимошенков С.П., Чаплыгин Ю.А. Разработка микрогироскопов на основе многослойных структур кремния и стекла // Микросистемная техника. 1999. № 1. С. 36-41.
| Наверх |